Движение ИСЗ в условиях конечной скорости распространения гравитационного взаимодействия Текст научной статьи по специальности «Математика»
ДВИЖЕНИЕ ИСЗ В УСЛОВИЯХ КОНЕЧНОЙ СКОРОСТИ РАСПРОСТРАНЕНИЯ ГРАВИТАЦИОННОГО ВЗАИМОДЕЙСТВИЯ
В соответствии с [1], исходная модель движения ИСЗ, учитывающая запаздывание гравитационного взаимодействия со стороны Земли во вращающейся (географической) жестко связанной с последней системе координат, имеет вид:
.. r(t-T) г = —ц
Ir(t — т)\
гравитационный параметр Земли,
(1)
параметр временного запаздывания
где /Л
(г = |г(0|/сг).
Аналитическое решение задачи (1) возможно лишь с введением жестких ограничений на элементы модели (условие квантования орбит) [1], поэтому вместо исходных уравнений будем рассматривать аппроксимирующие, получаемые разложением их правой части в ряд Тейлора (с точностью о(т)):
КО
+ —
КО КО’
1-3
КОКО
Ко!2
r{t)r
(2)
Для произвольного вида дифференциальных уравнений с отклоняющимся аргументом известно, что такой подход зачастую приводит к системам, интегральные кривые которых сильно отличаются от решений исходных уравнений [2]. Однако, для рассматриваемой задачи — моделирования движения околостационарного спутника, численное сравнение решений, полученных непрерывным методом Дормана-Принса (четвертого порядка точности) [3], показывает незначительные (менее 1 мм за сутки) различия траекторий (1) и (2), что обосновывает выбор последних в качестве аппроксимирующей модели.
Однако, для рассматриваемой задачи — моделирования движения околостационарного спутника, численное сравнение решений, полученных непрерывным методом Дормана-Принса (четвертого порядка точности) [3], показывает незначительные (менее 1 мм за сутки) различия траекторий (1) и (2), что обосновывает выбор последних в качестве аппроксимирующей модели.
*1[Г6, ф, г ad
1.4 0.7
0.0 -0.7 -1.4
-14.4 -9.6 -4.8 D.D 4.8 9.6 14.4 19.2 24.0 *10’U, JL, rad
Рис.1
_1____________________1____________________1___________________[_
і___________________і___________________[__________________|_
‘ ■ ‘ ‘ ‘ ‘ 3
Общее представление о характере эволюции запаздывающей (при а = се / с = 10 ) орбиты
от опорной околостационарной (е = 0, г = 0.0001габ/ ) дает рис.1, на котором хорошо видно, перемещение восходящего узла орбиты вправо (на Восток) и ее расширение, свидетельствующее о неустойчивости движения; (р и Я — соответственно географические широта и долгота.
 Принимая во внимание значения этих расхождений и учитывая оценки возмущений орбит [4], обусловленных различными факторами известной природы, с уверенностью можно сделать заключение о том, что, по крайней мере, с » с.
Принимая во внимание значения этих расхождений и учитывая оценки возмущений орбит [4], обусловленных различными факторами известной природы, с уверенностью можно сделать заключение о том, что, по крайней мере, с » с.о
Таблица
0 1 0 49,52 449,4 25284
1000 0 0,0495 0,4494 25,28
1000 0 0,000495 0,004494 0,2528
0,001 1 50,88 62,63 449,6 25307
1000 0,005 0,0496 0,4497 25,31
1000 0,00005 0,000496 0,004497 0,2531
0,01 1 50,88 62,63 454,6 25520
1000 0,0509 0,0626 0,4546 25,52
1000 0,000509 0,000626 0,004546 0,2552
В самом деле, например, при i = 90° и cg= с расхождение более чем в 25 km, если бы оно
действительно имело место, не могло бы оставаться не замеченным, если принять во внимание возможности современных измерительных технологий, используемых при определении спутниковых орбит.
Подводя итог изложенному, сформулируем основные результаты исследования, а именно: в рамках гипотезы о запаздывании («радиолокационного» типа) гравитационного потенциала, не ограничивающей применение лагранжева формализма при описании движения в гравитационном поле, предложены уравнения движения ИСЗ на суточно-синхронных орбитах, выполнено их численное моделирование, отмечена неустойчивость движения.
ЛИТЕРАТУРА
1. Зубов В.И. Аналитическая динамика системы тел. -Л.: Изд-во ЛГУ, 1983. -385с.
2. Пинни Э. Обыкновенные дифференциально-разностные уравнения. -М.: Наука, 1965. -455с.
3. Хайрер Э., Нёрсетт С., Ваннер Г. Решение обыкновенных дифференциальных уравнений. Нежесткие задачи.-М.: Мир, 1990,-512с.
4. Решетнев М.Ф., Лебедев A.A., Бартенев В.А. и др. Управление и навигация искусственных спутников Земли на околокруговых орбитах. —М.: Машиностроение, 1998.
Потянихин Д. А.
ОТРАЖЕНИЕ УДАРНОЙ ВОЛНЫ ОТ ЖЕСТКО ЗАКРЕПЛЕННОЙ ГРАНИЦЫ
Рассмотрим задачу об отражении плоской продольной ударной волны постоянной интенсивности т = [llj, jb’j <‘j — компоненты единичной нормали) от жесткой преграды. Пусть ударная
prosputnik-орбиты движения искусственных спутников Земли
В космическом пространстве над Землёй спутники движутся по определённым траекториям, называемые орбиты движения искусственных спутников Земли. Орбита – это траектория движения (или в переводе с латинского “путь, дорога”) какого-либо материального объекта (в нашем случае спутника) вперёд по заранее заданной системе пространственных координат с учётом конфигурации силовых полей, действующих на него.
Осуществляется движение искусственных спутников Земли (ИСЗ) по трём орбитам: полярной, наклонной и экваториальной (геостационарная).
Полярная орбита имеет угловой градус наклонения равный 90°(обозначается буквой «i» от англ. inclination) по отношению к плоскости экватора. Этот угол ещё измеряется в минутах и секундах.
Наклонная же орбита расположена между полярной и экваториальной орбитами искусственных спутников Земли, образующая смещённый острый угол.
Главный и существенный недостаток полярной и наклонной орбиты в том, что спутник постоянно находится в движении по своей орбите, поэтому для отслеживания его положения антенну необходимо постоянно подстраивать для получения спутникового сигнала. Для автоматизированной подстройки антенны к положению спутника существуют специальные дорогостоящие оборудования, которые очень сложно установить и в дальнейшем обслуживать.
Геостационарная орбита (её ещё называю экваториальной) имеет нулевое отклонение и находится в плоскости экватора нашей планеты. Спутник, движущийся по ней совершает полный виток, равный тому времени, за которое Земля вращается вокруг своей оси. То есть по отношению к наземному наблюдателю такой спутник будет казаться неподвижным в одной точке.
1-Геостационарная орбита (ГСО) или экваториальная орбита.
2-Наклонная орбита.
3-Полярная орбита.
Высота над поверхностью Земли геостационарной орбиты (ГСО) равна 35876 км, радиус 42241 км, а её протяжённость (длина) равна 265409 км. Необходимо учитывать эти параметры при выведения спутника на
Именно геостационарную орбиту используют для запуска большинства спутников коммерческого назначения. Скорость движения спутника по ГСО примерно равна 3000 м/с.
Помимо сильных есть у геостационарной орбиты и слабая сторона: на приполярных районах Земли угол местности очень мал, поэтому передача сигнала становится невозможным – в связи с перенасыщением геостационарной орбиты, которое происходит из-за скопления нескольких спутников с небольшим расстоянием друг от друга.
Для спутникового телевидения используются спутники, находящиеся на ГСО, поэтому антенна пользователя неподвижна. Чем ближе широта к северу, тем меньше можно спутников принять.
Чем ближе широта к северу, тем меньше можно спутников принять.
Обычно спутниковая антенна настраивается по двум координатам: азимуту (отклонение самого спутника от направления в сторону “Север” и плоскостью горизонта, определяемая по часовой стрелке) и углу места (угол между плоскостью горизонта и направлением на спутник).
От секунды до года: 2. Искусственные спутники Земли
g ≈ 10 м/с2 — ускорение свободного падения,
R — радиус Земли
Подавляющее большинство космических аппаратов — это искусственные спутники Земли. Они движутся по круговой или вытянутой орбите вокруг Земли на высоте от сотен до тысяч километров (интересующиеся этой темой могут посмотреть спутники в реальном времени на Google Earth). Поэтому длину их траектории можно принять примерно равной длине земной окружности — 40 тыс. км. Для того чтобы удержаться на круговой орбите, спутники движутся с первой космической скоростью — она составляет примерно 7,9 км/с. Отсюда получаем период обращения спутника на низкой околоземной орбите:
|
Самый крупный искусственный спутник — Международная космическая станция, МКС, — очень хорошо видна на темном вечернем или утреннем небе. Когда на Земле уже наступили сумерки, а МКС еще освещена Солнцем, она предстает внимательному наблюдателю в виде яркой немигающей белой звездочки, быстро перемещающейся по небу.
Такое может быть только тогда, когда траектория МКС проходит географически близко к наблюдателю. Высота орбиты МКС составляет 330 км, а значит, для достаточно близкого наблюдателя она будет хорошо видна на протяжении примерно одной-двух тысяч километров своей траектории. Поэтому наблюдатель увидит ее проход по небу примерно за
Поэтому наблюдатель увидит ее проход по небу примерно за
|
Так что, если вы, вооружившись точным временем пролета МКС над вашим домом, решили ее пронаблюдать, помните — вам на это зрелище дается от силы несколько минут!
Кстати, с непривычки МКС можно спутать и с ярко освещенным самолетом, ведь он тоже выглядит перемещающейся по небу звездочкой. Что самое забавное, скорости перемещения по небу для них примерно равны. Хотя МКС летит примерно в 30 раз быстрее самолета, ее орбита проходит в 30 раз выше траектории самолета, так что угловые скорости их движения совпадают для наземного наблюдателя. Это просто совпадение, никакого глубокого физического смысла за ним не стоит.
Движение искусственных спутников Земли и космических аппаратов
Движениеискусственных
спутников Земли и
космических
Строение Солнечной системы
аппаратов
Сегодня на уроке
1
Вспомним, почему
искусственные спутники не
падают на поверхность Земли
при своём движении вокруг неё.
2
Дадим определения первой,
второй и третьей космическим
скоростям.
3
Выясним, по каким орбитам
могут двигаться космические
аппараты в зависимости от их
начальной скорости.
4
Узнаем, какие орбиты
космических аппаратов
называются гомановскими.
Закон всемирного
тяготения
Любые два тела притягивают друг
друга силами, прямо
пропорциональными произведению
масс этих тел и обратно
пропорциональными квадрату
расстояния между ними.
И. Ньютон
Первый закон Кеплера (1605):
все планеты движутся по
эллиптическим орбитам, в одном
из фокусов которых находится
Солнце.

Второй закон Кеплера (1602):
радиус-вектор планеты описывает
в равные промежутки времени
равновеликие площади.
Третий закон Кеплера (1618):
квадраты периодов обращения
планет относятся как кубы
больших полуосей их орбит:
Иоганн Кеплер
1571—1630
Первый обобщённый закон
Кеплера
Движение одного небесного тела в
поле тяготения другого небесного
тела происходит по одному из
конических сечений.
И. Кеплер
Окружность
Эллипс
Парабола
Гипербола
Третий обобщённый закон
Кеплера
Квадраты сидерических периодов
спутников, умноженные на сумму
масс главного тела и спутника,
относятся как кубы больших
полуосей орбит спутников.
И. Кеплер
Движение ИСЗ и КА
Искусственные спутники планет
—
космические аппараты,
созданные людьми, которые
позволяют наблюдать за
планетой, около которой они
вращаются, а также другими
астрономическими объектами из
космоса.
Движение ИСЗ и КА
И. Ньютон
Движение ИСЗ и КА
И. Ньютон
Движение ИСЗ и КА
И. Ньютон
Движение ИСЗ и КА
И. Ньютон
Движение ИСЗ и КА
Спутник движется как
свободно падающее тело с
ускорением свободного
падения.
Искусственным спутником
Земли может стать любое тело
произвольной массы.
Движение ИСЗ и КА
Скорость, при достижении
которой космический аппарат,
запускаемый с Земли, может
стать её искусственным
спутником, называется первой
космической скоростью.
Движение ИСЗ и КА
Скорость, при достижении
которой космический аппарат,
запускаемый с Земли, может
стать её искусственным
спутником, называется первой
космической скоростью.
Движение ИСЗ и КА
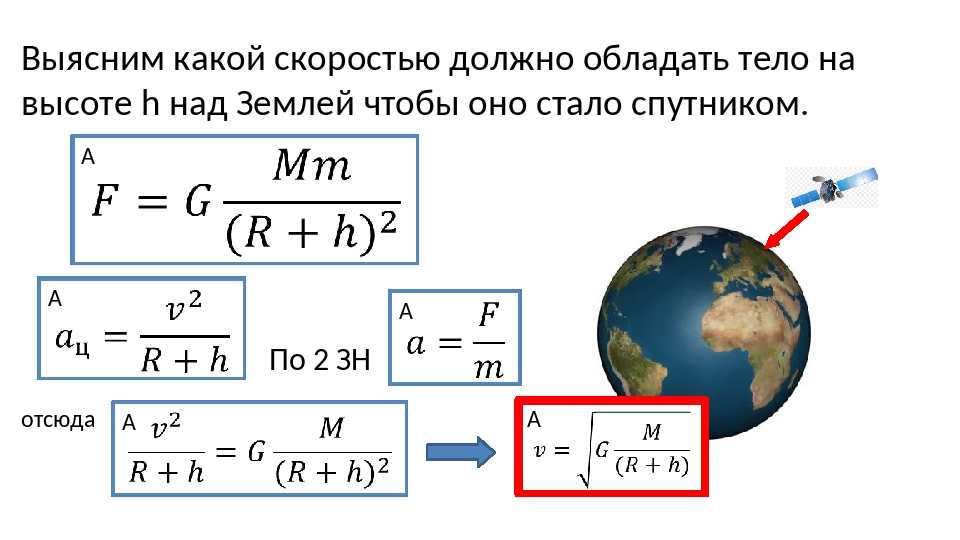
2-й закон Ньютона:
Закон всемирного
тяготения:
Центростремительное
ускорение:
Тогда
Если , то
Ускорение свободного
падения:
1-я космическая
скорость:
Движение ИСЗ и КА
2-й закон Ньютона:
1-я
космическая
Закон
всемирного
скорость:
тяготения:
Центростремительное
ускорение:
Если , то
Тогда
1-я космическая
Ускорение свободного
падения:
скорость:
Вблизи поверхности
Если , то
Земли:
Движение ИСЗ и КА
Первая космическая скорость:
Почему спутник
не падает на
поверхность
планеты?
Движение ИСЗ и КА
8000 м
Пусть
Тогда
5м
Движение ИСЗ и КА
Спутник-1 —
первый искусственный спутник
Земли, советский космический
аппарат, запущенный на
орбиту
4 октября 1957 года.

С. П. Королёв
Движение ИСЗ и КА
Скорость, при достижении
которой космический аппарат,
запускаемый с Земли, может
преодолеть земное притяжение и
осуществить полёт к другим
планетам Солнечной системы,
называется второй космической
скоростью.
Движение ИСЗ и КА
Третья космическая скорость —
минимальная скорость, которую
необходимо придать
находящемуся вблизи
поверхности Земли телу, чтобы
оно могло преодолеть
гравитационное притяжение
Земли и Солнца и покинуть
пределы Солнечной системы.
Послание
КА «Вояджер-1»
на КА «Вояджер-1»
Движение ИСЗ и КА
Третья космическая скорость:
Орбитальная скорость Земли:
Третья космическая скорость для
Земли:
Движение ИСЗ и КА
Первая космическая скорость:
Вторая космическая скорость:
Третья космическая скорость:
Задача 1. Определите первую и вторую космические скорости для Луны.
ДАНО
РЕШЕНИЕ
Первая космическая
скорость:
Вторая космическая
скорость:
ОТВЕТ:
= 1679 м/с; = 2374 м/с.
Движение ИСЗ и КА
Спутник-1 —
первый искусственный спутник
Земли, запущенный на орбиту
4 октября 1957 года.
С. П. Королёв
Исаак Ньютон
1643—1727
Марсоход
Curiosity
Траектория полёта на
Луну
Движение ИСЗ и КА
Необходимые условия для
запуска космического аппарата:
1) геоцентрическая скорость КА
должна превышать 2-ю космическую
скорость;
2) гелиоцентрическая орбита
аппарата должна пересекаться с
орбитой данной планеты;
3) орбита КА должна быть наиболее
оптимальной с точки зрения сроков
полёта, затрат топлива и т. д.
КА «Розетта» и комета
Чурюмова
— горизонты»
Герасименко
КА
«Новые
Марсоход
«Спирит»
Движение ИСЗ и КА
Энергетически оптимальные
орбиты —
орбиты, которые соответствуют
наименьшей геоцентрической
скорости космических
аппаратов в момент достижения
границы сферы действия Земли.

Движение ИСЗ и КА
Энергетически оптимальные
орбиты—
орбиты, которые соответствуют
наименьшей геоцентрической
скорости космических
аппаратов в момент достижения
границы сферы действия Земли.
Полуэллиптическая
(гомановская)
орбита
Вальтер Гоман
1880—1945
Полуэллиптическая
(гомановская) орбита
Задача 2. Определите среднее
время полёта на Марс, если его большая полуось
равна
1,52 а. е.
ДАНО
РЕШЕНИЕ
Третий закон
Кеплера:
Большая полуось
спутника:
Время полёта на
Марс:
ОТВЕТ: среднее время полёта на Марс составит 259 суток.
Космический корабль
«Союз»
Космический
аппарат «КассиниГюйгенс»
Первые фотографии
поверхности Венеры,
сделанные космическим
аппаратом «Венера-7»
Выводы
Системы спутниковой связи на геостационарной орбите
Калью Кукк, главный эксперт, МНИТИ, профессор, д. т. н.Общие положенияСлово «орбита» в переводе с латинского означает «дорога», «колея». Этим термином великий немецкий ученый Иоганн Кеплер в начале XVII в. назвал траекторию движения небесных тел в космическом пространстве. Им были открыты и сформулированы основные законы их движения. После запуска в октябре 1957 г. первого в мире советского спутника Земли «Спутник-1» такие понятия, как «искусственное небесное тело» или «искусственный спутник Земли» стали реальностью. Их движение подчиняется тем же эмпирическим законам Кеплера.
Первый закон Кеплера гласит, что траектория движения планет является эллипсом, в одном из фокусов которого находится Солнце. Частный случай движения планеты − движение по круговой орбите (при этом эксцентриситет эллипса, т. е. отношение расстояния между фокусами к большой оси, будет равен нулю или мало отличаться от нуля). В соответствии с первым законом Кеплера один из фокусов эллипса, по которому движется искусственное небесное тело в поле тяготения Земли, должен находиться в центре Земли. Отсюда следует, что искусственный спутник Земли не может двигаться вдоль ее параллели, за исключением экваториальной плоскости. Второй фокус будет расположен на таком же расстоянии от апогея орбиты спутника, на каком центр Земли находится от ее перигея (рис. 1).
Отсюда следует, что искусственный спутник Земли не может двигаться вдоль ее параллели, за исключением экваториальной плоскости. Второй фокус будет расположен на таком же расстоянии от апогея орбиты спутника, на каком центр Земли находится от ее перигея (рис. 1).
Согласно второму закону Кеплера радиус-вектор планеты в равные промежутки времени описывает равные площади (рис. 2). Из второго закона Кеплера вытекает, что планета движется вокруг Солнца неравномерно, имея около перигея более высокую линейную скорость, чем около апогея.
Рис. 2. Геометрическая иллюстрация ко второму закону Кеплера, где: O – центр Земли; Rc – радиус-вектор спутникаТретий закон гласит: квадраты времени обращения планеты вокруг Солнца пропорциональны кубу большой полуоси эллипса a (см. рис. 1):
где: Tc – период обращения планеты на орбите; a – величина большой полуоси эллипса;
k – постоянная.
То есть чем меньше высота орбиты, тем меньше период обращения.
В общем случае любая спутниковая орбита описывается рядом параметров, из которых основными являются:
- геометрическая форма орбиты;
- высота орбиты спутника, определяемая как наименьшее расстояние до земной поверхности в километрах;
- наклонение орбиты – угол между плоскостью экватора и плоскостью орбиты.
По геометрической форме орбиты делятся на круговые и эллиптические и отличаются по наклонению к плоскости экватора. При совпадении с плоскостью экватора они называются экваториальными. Орбиты, перпендикулярные к плоскости экватора, называются полярными. По высоте орбиты над земной поверхностью (Н) они условно делятся на низкие (Н ≤ 2000 км), средние (Н = 2000…20000 км) и высокие (Н ≥ 20000 км). Особое место среди разнообразных орбит занимают высокоэллиптические орбиты с большим отношением между высотами апогея и перигея.
Точку пересечения с поверхностью Земли радиуса-вектора, соединяющего спутник с центром Земли, называют подспутниковой точкой. В этой точке наблюдатель видит спутник в зените. При отклонении от подспутниковой точки увеличивается расстояние от наблюдателя до спутника, а отклонение от зенита можно описать двумя угловыми величинами: азимутом и углом места [1].
Геостационарная орбитаКруговая орбита высотой 35 880 км, лежащая в экваториальной плоскости Земли, называется геостационарной орбитой (ГСО). Спутник при движении по этой орбите в восточном направлении совершает вокруг Земли оборот за одни звездные сутки (23 часа 56 минут 4 секунды) и, следовательно, будет постоянно находиться над определенной точкой на экваторе Земли (подспутниковая точка). В этом и заключается уникальность геостационарной орбиты.
Зона видимости с геостационарного спутника достаточно большая и занимает около одной трети земной поверхности (рис. 3). Однако приполярные зоны остаются вне зоны видимости. Видимость спутника с Земли определяется не только широтой, но и долготой.
Рис. 3. Зона видимости геостационарного спутникаИскусственные спутники Земли, которые находятся на геостационарной орбите два раза в год в периоды времени, близкие к осеннему и весеннему равноденствию, попадают в тень Земли. Время каждого затенения не превышает 1 часа 10 минут.
Спутниковая связь с использованием космических аппаратов (КА) на геостационарной орбите является достаточно универсальным средством передачи и позволяет реализовать широкий перечень услуг в области междугородной и международной телефонной и факсимильной связи, передачи данных, распределения программ звукового и телевизионного вещания, передачи газетных полос, непосредственного звукового и телевизионного вещания, выхода в сеть Интернет, предоставления доступа в службы мультимедиа. Спутниковые геостационарные системы используются также для организации VSAT-сетей различной конфигурации, для резервирования наземных каналов связи, сбора мониторинговой информации и т. д.
д.
Международно-правовой статус геостационарной орбиты провозглашает и закрепляет участок околоземного космического пространства, составляющего геостационарную орбиту, в качестве «достояния всего человечества» и призван обеспечить ее эффективное и безопасное использование, а также доступ к ней всех государств на справедливой и рациональной основе. Значительный вклад в решение проблем выработки эффективного международно-правового статуса ГСО вносят Организация Объединенных Наций (ООН), ее органы (Конференции ООН по исследованию и использованию космического пространства в мирных целях, Комитет ООН по космосу и его Научно-технический и Юридический подкомитеты) и специализированные учреждения Международного союза электросвязи (МСЭ). Детальные технические правила и процедуры использования радиочастотного спектра и геостационарной орбиты содержатся в Регламенте радиосвязи МСЭ [2, 3].
В настоящее время на ГСО зафиксировано более 500 объектов искусственного происхождения (спутники, ступени ракет, отдельные фрагменты). Из них около половины являются действующими спутниками связи и вещания, принадлежащими как международным организациям, так и отдельным государствам или частным компаниям.
Первый введенный в эксплуатацию советский геостационарный спутник «Радуга» («Стационар-1») в интересах Министерства обороны РФ был запущен в подспутниковую точку 85о в. д. в декабре 1975 г. с помощью РН «Протон-К».
Российская группировка гражданских спутников связи в настоящее время состоит из 15 действующих космических аппаратов, принадлежащих ФГУП «Космическая связь» и ОАО «Газпром – космические системы».
Законы Кеплера действительны при движении планет или спутников в поле тяготения, в котором отсутствуют возмущающие факторы. Орбиты искусственных спутников Земли в силу малости их масс могут изменяться под действием внешних возмущающих сил. Отклонение движения геостационарных спутников Земли от заданной орбиты вызывается несферичностью Земли, притяжением Луны и Солнца, давлением солнечного ветра и т. д. В результате этого геостационарный спутник постепенно смещается вдоль орбиты в сторону четырех точек стабильного состояния (75,3° в. д., 104,8° з. д., 166,3° в. д. и 14,7° з. д.), а также увеличивается наклонение его орбиты к экватору со скоростью 0,85° в год.
д. В результате этого геостационарный спутник постепенно смещается вдоль орбиты в сторону четырех точек стабильного состояния (75,3° в. д., 104,8° з. д., 166,3° в. д. и 14,7° з. д.), а также увеличивается наклонение его орбиты к экватору со скоростью 0,85° в год.
В соответствии с действующими требованиями спутники при длительной эксплуатации (до 15−16 лет) должны удерживаться на геостационарной орбите с точностью ±0,1º. Отсюда следует необходимость периодической коррекции положения спутников на орбите. Коррекция осуществляется по направлению север−юг для сохранения заданного наклонения и по направлению восток−запад для удержания спутника в его назначенном положении в пределах геостационарного пояса.
Для поддержания заданного положения спутника на геостационарной орбите на платформе КА устанавливаются специальные корректирующие двигатели, а также запас топлива для них («рабочее тело»). Масса рабочего тела может составлять сотни килограмм. Запас топлива во многих случаях определяет срок активного существования КА. Корректирующие двигатели могут быть химическими, электроракетными или плазменными. Включение двигателей осуществляется периодически один раз в несколько суток. Эти же двигатели могут быть использованы для перемещения при необходимости спутника в другую точку стояния на ГСО.
На геостационарных спутниках предусматривается запас топлива для перевода выработавшего ресурс либо подлежащего замене КА на орбиту захоронения. Орбита захоронения находится выше геостационарной орбиты на 200−300 км.
К недостаткам систем связи с использованием геостационарных спутников следует отнести:
- большое время распространения сигнала по линии «Земля − спутник – Земля» − 0,24 с;
- невозможность связи с арктическими районами Земли;
- повышенные требования к энергетике линий связи «Земля − спутник» и «спутник − Земля» из-за большой протяженности трассы;
- ограниченные потенциальные возможности по количеству размещаемых на орбите спутников.
Низкие орбиты
В связи с перегруженностью геостационарной орбиты в последние два десятилетия большое внимание уделяется многоспутниковым системам связи с расположением КА на низких орбитах. Космический сегмент в этом случае строится из совокупности спутников, образующих орбитальную группировку. Спутники могут находиться на круговых или эллиптических орбитах, равномерно расположенных над земной поверхностью так, чтобы интересующие географические точки на Земле имели радиовидимость по крайней мере с одним КА. Для таких спутниковых систем с круговыми орбитами высота орбиты обычно выбирается в пределах от 600 до 1500 км. Это обусловлено тем, что при меньших высотах ощущается действие атмосферы, что приводит к торможению движения спутника и постепенному снижению высоты его орбиты.
На высотах более 1500 км располагается внутренний радиационный пояс Земли (пояс Ван Аллена), который делится на внутреннюю и внешнюю зоны (рис. 4). В этих зонах магнитное поле Земли удерживает заряженные частицы (протоны, электроны, α-частицы) с высокой кинетической энергией от десятков кэВ до сотен МэВ. Во внутренней зоне на высоте примерно 3000 км находится максимум плотности потока протонов высокой энергии (20…800 МэВ).
Рис. 4. Расположение радиационных поясов ЗемлиПромежуток между внутренней и внешней зонами находится в пределах от 5000 до 15 000 км. Нахождение аппаратуры, особенно полупроводниковой, в радиационных поясах Ван Аллена приводит к возникновению дефектов в кристаллах и в конечном счете к отказам в работе аппаратуры. Поэтому при выборе высоты для низкоорбитальных спутников должны быть исключены высоты длительного нахождения спутников в радиационных поясах Земли.
Преимуществом низкоорбитальных систем является возможность использования компактных и относительно дешевых абонентских терминалов благодаря меньшему расстоянию между ретранслятором ИСЗ и земными станциями по сравнению с геостационарными спутниковыми системами, а также создания глобальной системы и связи с абонентами, находящимися в любой точке земной поверхности. Кроме того, для запуска ИСЗ требуются относительно небольшие ракеты-носители (РН), менее критичен выбор место старта РН.
Кроме того, для запуска ИСЗ требуются относительно небольшие ракеты-носители (РН), менее критичен выбор место старта РН.
Низкоорбитальные системы с передачей сигналов с задержкой (телеграф, электронная почта) применяются уже много лет, в основном для специальных целей. Для телефонной связи и передачи данных в реальном режиме времени такие системы непригодны. Зона видимости низколетящего спутника в виде пятна непрерывно перемещается по земной поверхности и доступна абоненту в зависимости от размера этого пятна в течение 10−15 минут. Для обеспечения непрерывности связи требуются и непрерывная смена зон видимости от следующих друг за другом спутников, и соответствующее переключение линии связи между двумя абонентами. Поэтому спутников должно быть достаточно много. На низких орбитах их число обычно должно составлять 48 и более [4].
Для работы ЗС, расположенных в произвольной точке Земли, необходимо использование наклонных, а не экваториальных орбит. Наилучший вариант для глобального обслуживания − полярные орбиты (угол наклонения 90о). Использование нескольких полярных орбитальных плоскостей сопряжено с опасностью столкновения спутников. Поэтому чаще задействуются околополярные орбиты с наклонением 80…86о. Выбор угла наклонения обусловлен и географическим нахождением стартового комплекса ракеты-носителя, с помощью которого осуществляется запуск КА. Любой запуск РН связан с падением на Землю отработавших ступеней. Допустимая территория падения этих ступеней строго оговаривается для любого космодрома, что и определяет возможные углы наклонения. Срок активного существования низкоорбитальных спутников обычно меньше, чем у геостационарных или средневысотных, вследствие того, что у этих спутников время нахождения в тени Земли значительно больше, а это приводит к сложностям обеспечения электропитанием на борту (большое количество циклов зарядки-разрядки аккумуляторов). Время затенения составляет примерно половину времени витка. При освещении и затенении КА происходит соответственно разогрев и охлаждение элементов КА до температур +100 и −150 оС. Для сокращения энергопотребления предусматривается возможность перехода на пониженное потребление мощности полезной нагрузкой при прохождении спутником участков поверхности Земли с нулевым или малым трафиком.
Для сокращения энергопотребления предусматривается возможность перехода на пониженное потребление мощности полезной нагрузкой при прохождении спутником участков поверхности Земли с нулевым или малым трафиком.
В России в марте 2015 г. завершено развертывание глобальной низкоорбитальной спутниковой системы связи «Гонец», состоящей из 12 КА и предназначенной для организации передачи информации по принципу «электронная почта». Орбитальная группировка состоит из четырех плоскостей по три аппарата в каждой плоскости. Круговая орбита имеет высоту 1500 км и наклонение 82,5о.
В настоящее время в мире развернуты две низкоорбитальные системы телефонной связи – «Иридиум» и «Глобалстар» [5]. Обе системы имеют свои сегменты в Российской Федерации.
Орбитальная группировка система «Иридиум» насчитывает 66 спутников, обращающихся вокруг Земли по 11 орбитам на высоте примерно 780 км. Это единственная система гражданской спутниковой телефонной связи, покрывающая 100% поверхности Земли, включая полярные области. Отличительной особенностью системы является наличие межспутниковой связи.
Космический сегмент системы «Глобалстар», обеспечивающий телефонную связь, состоит из 48 спутников на высоте 1414 км с наклонением 52°. На каждой из восьми орбитальных плоскостей располагаются 6 ИСЗ. Из-за малого угла наклонения зона обслуживания системы находится в пределах 0−75° с. и ю. ш. В России расположены три станции сопряжения системы «Глобалстар» с сетью общего пользования страны.
Высокоэллиптические орбитыБольшое практическое значение, особенно в нашей стране, в свое время приобрело использование высокоэллиптической орбиты в системах спутниковой связи со спутниками «Молния». Эта орбита (также под названием «Молния») характеризуется большим отношением высоты апогея (40 250 км) к высоте перигея (500 км). При нахождении апогея в Северном полушарии создается обширная зона видимости территории России, включая приполярные районы, в течение не менее 8 часов.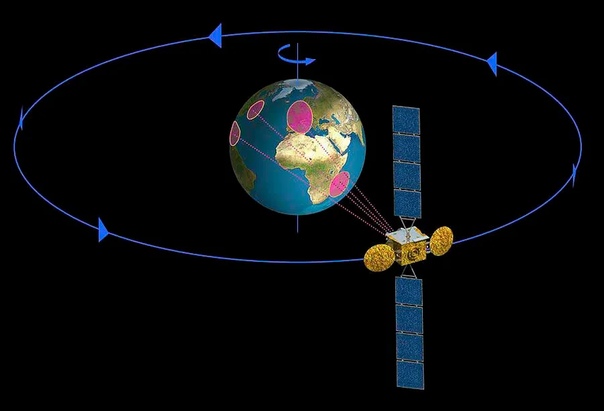 Период обращения на такой орбите составляет 12 часов. С помощью трех-четырех спутников на таких высокоэллиптических орбитах возможна организация круглосуточной связи практически между любыми пунктами российской территории. Как правило, группировка системы с использованием высокоорбитальной орбиты «Молния» состоит из четырех КА, сдвинутых по времени на 6 часов. Каждый спутник в течение суток дважды проходит апогейную точку: первый раз над восточным полушарием (основной виток), второй − над западным полушарием (сопряженный виток) [6].
Период обращения на такой орбите составляет 12 часов. С помощью трех-четырех спутников на таких высокоэллиптических орбитах возможна организация круглосуточной связи практически между любыми пунктами российской территории. Как правило, группировка системы с использованием высокоорбитальной орбиты «Молния» состоит из четырех КА, сдвинутых по времени на 6 часов. Каждый спутник в течение суток дважды проходит апогейную точку: первый раз над восточным полушарием (основной виток), второй − над западным полушарием (сопряженный виток) [6].
К недостаткам спутниковой связи на высокоэллиптических орбитах следует отнести необходимость построения наземных станций со следящими антеннами. В этих системах также сказывается эффект Доплера, приводящий к изменению частоты принятых колебаний в зависимости от скорости изменения расстояния между спутником и наземной станцией.
Запуск первого высокоэллиптического спутника «Молния-1» в Советском Союзе был осуществлен 23 апреля 1965 г. в целях обеспечения дальней телефонной и телевизионной связи между Москвой и Дальним Востоком.
В ряде проектов рассматривается высокоэллиптическая орбита типа «Тундра», которая представляет собой высокоэллиптическую орбиту с 24-часовым периодом обращения. Эксцентриситет такой орбиты значительно меньше, чем орбиты типа «Молния», что приближает ее к круговой (см. таблицу). В частности, такая орбита выбрана для единственной в западном мире гражданской системы с использованием высокоэллиптической орбиты «Сириус».
Таблица. Основные характеристики орбит «Молния» и «Тундра»
| Орбитальные элементы | Тип орбиты | |
| Молния | Тундра | |
| Период, с | 43 063 | 86 164 |
| Большая полуось, км | 26 554 | 42 184 |
| Наклонение,° | 63,4 | 63,4 |
| Аргумент перигея, ° | 270 | 270 |
| Высота перигея, км | 1000 | 21 029 |
| Высота апогея, км | 39 352 | 50 543 |
| Эксцентриситет | 0,722 | 0,35 |
| Продолжительность сеанса связи над обслуживаемой территорией в течение суток, ч | 8 | 8 |
| Минимальное количество спутников для круглосуточного обслуживания | 3 | 3 |
| Пересечение поясов с повышенной радиацией | 4 раза в сутки | Не пересекаются |
| Видимость территории России из апогея (середина сеанса) | Полная | Полная |
| Видимость территории России из апогея (начало и окончание сеанса) | Неполная | Полная |
Благодаря длительному пребыванию КА в апогее высокоэллиптические орбиты типа «Молния» и «Тундра» иногда называют квазигеостационарными. Возможно построение аналогичных орбитальных группировок со значительно меньшим значением апогея с периодом обращения 4, 6 или 8 часов, при этом, естественно, требуется большее количество КА для обеспечения постоянного временнóго покрытия.
Возможно построение аналогичных орбитальных группировок со значительно меньшим значением апогея с периодом обращения 4, 6 или 8 часов, при этом, естественно, требуется большее количество КА для обеспечения постоянного временнóго покрытия.
Различное построение эллиптических орбитальных группировок позволяет решить главный вопрос спутниковой связи – существенно повысить пропускную способность «космоса» и обеспечить равные условия доступа к спутниковой связи приполярных районов Земли. На сегодняшний день, как показывают теоретические исследования и многолетняя практика космической связи, орбита типа «Молния» обладает наибольшим количеством положительных качеств.
В настоящее время в России на рабочих орбитах находится группировка из четырех КА «Меридиан», которая имеет двойное назначение (рис. 5). К гражданским задачам относятся организация спутниковой связи морских судов и самолетов в районе Северного морского пути с береговыми станциями и создание сети связи для северных районов Сибири и Дальнего Востока.
Рис. 5. Наземная трасса КА «Меридиан» (https://ru.wikipedia.org)Несмотря на то что нашей стране принадлежит приоритет по практическому использованию высокоэллиптической орбиты, дальнейшее продолжение работ по более широкому освоению этого типа орбиты затормозилось. Предусмотренное Федеральной космической программой на 2006−2015 гг. развертывание системы непосредственного спутникового радиовещания с использованием высокоэллиптических КА типа «Экспресс-РВ» не реализовано. Очередной ориентировочный срок запуска высокоэллиптических спутников сугубо гражданского назначения − 2020−2021 гг.
Проект российской спутниковой системы связи «Полярная звезда» с КА, расположенными на высокоэллиптических орбитах, которая предназначена для подвижной и фиксированной службы связи правительственных и государственных органов, населения и транспорта по всей территории России, включая северные и восточные районы, разрабатываемый ОАО «Газпром – космические системы», также не очень продвигается.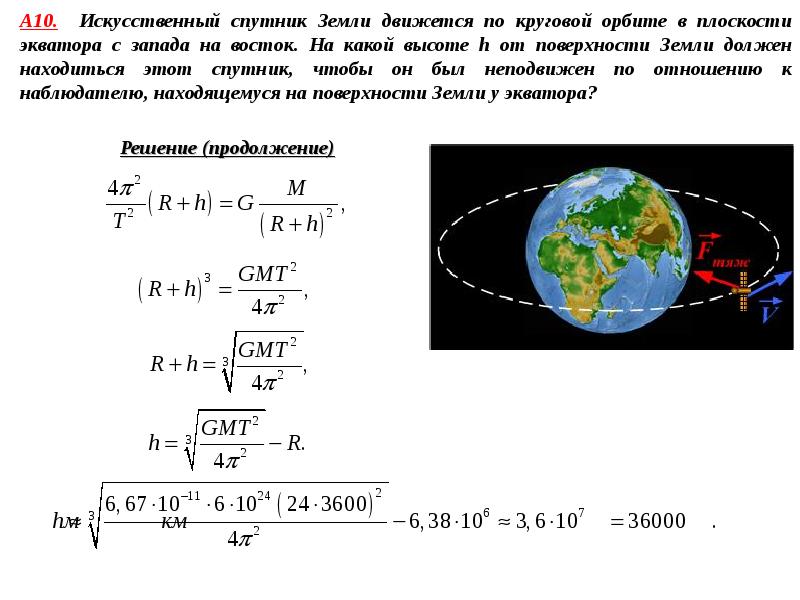 Скорее всего, это связано с низкой экономической эффективностью подобных систем.
Скорее всего, это связано с низкой экономической эффективностью подобных систем.
При описании процессов запуска спутников пользуются такими понятиями, как низкая опорная орбита или низкая околоземная орбита (НОО), переходная орбита (ПО), геопереходная орбита (ГПО).
Низкая околоземная орбита – это орбита космического аппарата около Земли (высота − примерно 200 км). Ее называют опорной, если предполагается увеличение ее высоты или изменение наклонения. Для движения по круговой или эллиптической опорной орбите аппарат должен двигаться с первой космической скоростью.
Переходная орбита − путь движения спутника с одной орбиты на другую. Геопереходной орбитой называется орбита, являющаяся переходной между низкой опорной орбитой и геостационарной орбитой. Движение спутников по переходным орбитам совершается под действием ракетной двигательной установки.
ЗаключениеЧеловечество еще далеко не исчерпало возможности использования ближнего космоса для построения систем связи различного назначения.
Следует ожидать, что перспективные низкоорбитальные системы связи впитают в себя новые виды услуг типа дистанционного зондирования Земли, мониторинга и т. п., что позволит оптимально сбалансировать спутниковые возможности и вывести низкоорбитальные системы на уровень прибыльности, не уступающий геостационарным системам. То же относится к системам с высокоэллиптическими спутниками.
Только использование низкоорбитальных и высокоэллиптических спутниковых орбит даст возможность нашей стране решить телекоммуникационные проблемы Крайнего Севера и Арктики [7].
Литература
- Кукк К.И. Спутниковая связь: прошлое, настоящее, будущее. М.: Горячая линия Телеком, 2015.
- Кантор Л.Я. Новый эволюционный подход к международному распределению орбитально-частотного ресурса // Электросвязь. 2008. № 12.
- Зубарев Ю.Б. Проблемы использования геостационарной орбиты // Вестник связи.
 1999. № 12.
1999. № 12. - Клепиков И.А., Кукк К.И. Низкоорбитальные спутниковые системы связи выходят на международный рынок // Мир связи. Connect. 1997. № 11−12.
- Всемирная энциклопедия космонавтики (А–К). М.: Военный парад, 2002.
- Системы спутниковой связи с эллиптическими орбитами, разнесением ветвей и адаптивной обработкой / Под ред. Е.Ф. Камнева. М.: Глобсатком, 2009.
- Кукк К.И. Низкоорбитальная комбинированная спутниковая система связи и мониторинга, в том числе для Арктического региона // Спутниковая связь и вещание – 2014. Специальный выпуск журнала «Технологии и средства связи». М.: Groteck, 2013.
Движение искусственных спутников Земли — Энциклопедия по машиностроению XXL
Движение искусственных спутников Земли в поле земного тяго> тения совершается под действием силы притяжения к Земле [c.205]Может оказаться, что движение, устойчивое относительно одних переменных, неустойчиво относительно других. Так, можно показать, что движение, искусственного спутника Земли по круговой орбите устойчиво относительно его радиуса-вектора (орбитальная устойчивость) и неустойчиво относительно декартовых координат. Поэтому, говоря об устойчивости движения, необходимо всегда оговаривать, относительно каких величин рассматривается устойчивость. [c.17]
Результаты, полученные в предыдущем параграфе, могут быть применены к движениям искусственных спутников Земли и искусственных планет под действием сил тяготения (но в отсутствие ка-ких-либо других сил). Если ракета-носитель поднялась на достаточную высоту, на которой плотность земной атмосферы, а следовательно, и ее сопротивление движению ничтожны, / . и если после этого двигатели раке- [c.328]
Вопрос о том, можно ли данное конкретное тело рассматривать как материальную точку, зависит не от размеров самого тела, а от условий предлагаемой задачи. Поэтому одно и то же тело при одних условиях можно принимать за материальную точку, а при других — нельзя. Например, изучая движение искусственного спутника Земли по его орбите, можно пренебречь его формой и размерами и рассматривать его как материальную точку. Если же изучается торможение спутника в атмосфере, то при этом необходимо учитывать влияние сопротивления воздуха на полет спутника и, следовательно, нужно учитывать его форму и размеры.
[c.7]
Поэтому одно и то же тело при одних условиях можно принимать за материальную точку, а при других — нельзя. Например, изучая движение искусственного спутника Земли по его орбите, можно пренебречь его формой и размерами и рассматривать его как материальную точку. Если же изучается торможение спутника в атмосфере, то при этом необходимо учитывать влияние сопротивления воздуха на полет спутника и, следовательно, нужно учитывать его форму и размеры.
[c.7]
В дальнейшем этот закон многократно позволял не только рассчитывать движения небесных тел по результатам астрономических наблюдений, но п предсказывать существование неизвестных светил по их влиянию на движения известных планет и звезд. Таким образом, например, были заранее определены положение и размер планеты Нептун. В настоящее время этот закон позволяет расчетным путем определять существование планет у далеких звезд, служит надежной основой для расчета движения искусственных спутников Земли и космических кораблей. [c.175]
Движение ракеты в космическом пространстве определяется законами небесной механики. Ракета для космических путешествий — это управляемый астероид. Так как плотные слои атмосфер у планет солнечной системы сосредоточены на малых (по сравнению с радиусом соответствующей планеты) высотах, то при изучении движений ракет в пределах солнечной системы при перелетах с одной планеты на другую нужно в большинстве случаев принимать во внимание только силы тяготения. Для изучения движения искусственных спутников Земли и ракет, предназначенных для достижения (или облета) Луны, в ряде случаев нужно учитывать только поле сил тяготения, обусловленное массой Земли. [c.95]
Полученные шесть дифференциальных уравнений движения определяют шесть параметров т], ф, т ), в функции времени t. В общем случае правые части этих уравнений зависят от шести параметров и их производных, так что приходится при определе-лии решения системы рассматривать совместно все шесть уравнений движения. В ряде частных случаев обе группы уравнений удается изучать независимо одну от другой, и задача разбивается на две 1) изучение движения центра масс твердого тела 2) изучение движения твердого тела относительно центра масс. Таким образом, например, удается решать многие задачи о движении искусственных спутников Земли.
[c.440]
В ряде частных случаев обе группы уравнений удается изучать независимо одну от другой, и задача разбивается на две 1) изучение движения центра масс твердого тела 2) изучение движения твердого тела относительно центра масс. Таким образом, например, удается решать многие задачи о движении искусственных спутников Земли.
[c.440]
Д В И Ж е н й е космического корабля в сопротивляющейся среде. Несмотря на свою крайнюю разреженность на больших высотах, атмосфера оказывает весьма значительное тормозящее действие на движение искусственного спутника Земли. В результате такого торможения спутник снижается, совершает более быстрый облет вокруг Земли и, в конце концов, прекращает свое существование. Возникают, в частности, такие вопросы каким образом возможно предсказать продолжительность жизни спутника Каким образом влияет на движение спутника сопротивление верхних слоев атмосферы И обратно, какие, выводы о верхней атмосфере можно сделать на основании наблюдений за изменением орбиты спутника Понятно, что эти же вопросы встанут при изучении движения искусственных спутников других небесных тел. [c.16]
Рассмотренные в этом параграфе случаи весьма важны для космонавтики. В частности, при изучении движения искусственных спутников Земли в течение небольшого промежутка времени (порядка одного-двух оборотов спутника [c.30]
Седов Л. И., Динамические эффекты в движении искусственных спутников Земли, Сб. Искусственные спутники Земли , вып. 2, 1958. [c.334]
В случае Дначальным скоростям, сообщаемым искусственному спутнику Земли, соответствует случай трех действительных корней действительном движении Р(г/)>0 и принимает значение в интервалах 1 3 «С 2 или периодическое движение, проходящее через центр притяжения. При начальных данных, соответствующих реальным случаям, движению искусственного спутника Земли соответствует изменение и в первом из указанных интервалов. [c.401]
[c.401]
Б е л е ц к и й В. В., Движение искусственного спутника Земли относительно центра масс, Сб. Искусственные спутники Земли , Изд-во АН СССР, 1958, вып. 1, 25—43. [c.411]
При подготовке второго издания, выполненной Н. В. Бутениным и Д. Р. Меркиным, частично или полностью переработаны и заново изложены некоторые разделы курса, написаны новая XXI глава, посвященная элементам теории нелинейных колебаний, и 14.6—14.9, в которых изложены основы теории движения искусственного спутника Земли относительно центра масс, добавлено много новых задач, пересмотрен весь текст, исправлены замеченные опечатки. [c.8]
Пример 3. Движение искусственного спутника Земли при выходе из его кабины космонавта. Пусть центр масс С всей системы [c.186]
С развитием космической техники возникли новые задачи механики, в частности большое значение приобрело исследование движения искусственного спутника Земли (ИСЗ) относительно его центра масс. Это движение может быть вызвано различными силами. Учитывая характер настоящего руководства, мы ограничимся постановкой задачи и исследованием некоторых частных случаев движения ИСЗ относительно центра масс под действием [c.333]
Движение искусственных спутников Земли и искусственных планет [c.10]
Раз открытый закон механического движения неизменно и вполне определенно проявляет себя в самых разнообразных частных задачах. Например, можно наблюдать, объяснить и проверить справедливость теоремы площадей и при движении шарика на нити, и при движении искусственных спутников Земли, и при движении планет солнечной системы. Механика учит не только видеть мир, но и понимать его. [c.16]
Мы получили, что относительное движение материальных точек вблизи Земли описывается уравнениями относительного движения в задаче двух тел (Земля — материальная точка). В частности, уравнения (15 ) описывают движение искусственных спутников Земли.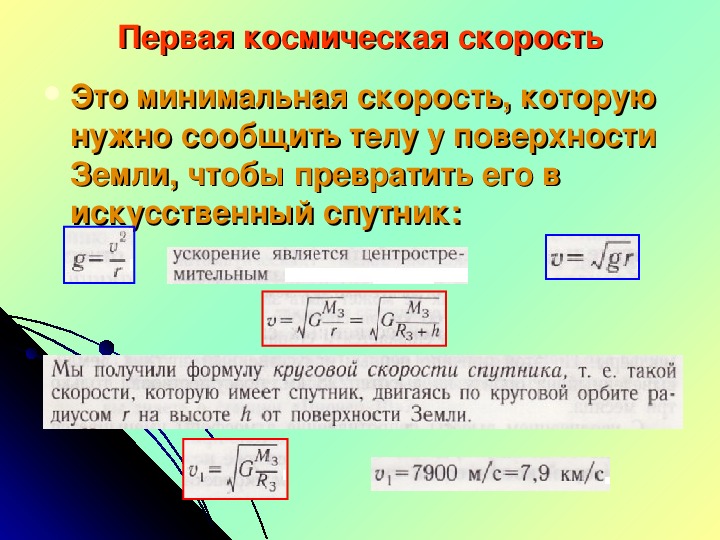 [c.69]
[c.69]
МОЖНО отнести задачу о движении твердых тел на движущемся основании, движение твердого тела с полостью, заполненной жидкостью, задачу о движении ракеты, применение принципа Гамильтона—Остроградского к системам с распределенными массами и т. п. Специально рассмотрены вопросы, связанные с возмущенным движением искусственного спутника Земли. [c.10]
Вопрос о форме земной поверхности имеет значение для теории гироскопических приборов, в задаче о движении искусственного спутника Земли и в других динамических исследованиях. С другой стороны, рассмотрение его дает превосходный пример применения понятия о потенциальной энергии ). [c.205]
Особенно следует отметить эрозию сопловых устройств и газовых эжекторов, используемых в авиационной и ракетной технике. При движении искусственных спутников Земли, а в недалеком будущем и межпланетных кораблей, мы также встретимся с эрозионным разрушением их поверхностей под воздействием микрометеор ных частиц и космической пыли. [c.6]
ТЕОРИЯ ДВИЖЕНИЯ ИСКУССТВЕННЫХ СПУТНИКОВ ЗЕМЛИ [c.1]
Таким образом, движение искусственных спутников Земли (или другой планеты) происходит по тем же законам, которые управляют движением планет вокруг Солнца. Эти законы открыты Кеплером (1571 —1630) в начале XVII века на основании наблюдений, проведенных другим ученым — Тихо Браге (1546—1601). Законы, носящие имя Кеплера, теоретически доказанЕЛ позднее Ньютоном (1643—1727). Имеется три основных закона Кеплера [c.508]
Если в некоторых случаях движения отдельных точек тела одинаковы, или различиями этих движений можно пренебрегать, то вопрос об изучении движения тела можно привести точно или приближенно к изучению движения материальной точки. Например, изучая движения планет вокруг Солнца, можно иногда пренебрегать различиями движений отдельных точек планет относительно Солнца. Поэтому в первом приближении при изучении двилматериальные точки. Отметим, что одно и то же тело в одних случаях можно рассматривать как материальную точку, а в других — следует принимать во внимание его размеры. Например, изучая движение Земли вокруг Солнца можно, как уже 07мечалось, рассматривать Землю как материальную точку. Однако, изучая движение искусственного спутника Земли, следует принимать во внимание размеры Земли и в некоторых случаях даже форму рельефа земной поверхности.
[c.17]
Поэтому в первом приближении при изучении двилматериальные точки. Отметим, что одно и то же тело в одних случаях можно рассматривать как материальную точку, а в других — следует принимать во внимание его размеры. Например, изучая движение Земли вокруг Солнца можно, как уже 07мечалось, рассматривать Землю как материальную точку. Однако, изучая движение искусственного спутника Земли, следует принимать во внимание размеры Земли и в некоторых случаях даже форму рельефа земной поверхности.
[c.17]
Все перечисленные новые (для классической небесной механцки) дополнительные силы привели к созданию новой науки влияние методов этой науки начинает проникать в классическую небесную механику и в преподавание теоретической механики . Для желающих понять объем современных исследований по теории движения искусственных спутников Земли мы рекомендуем монографию П Г. Эльясберга. Автор этой монографии справедливо подчеркивает, что в противоположность академической созерцательности класси- [c.40]
Аксенов Е. П., Гребеников Е. А., Демин В. Г., Применение обобш,енной задачи двух неподвижных центров в теории движения искусственных спутников Земли, Сб. Проблемы движения искусственных небесных тел , 1963, стр. 92—98. [c.332]
В небесной механике и теории движения искусственных спутников Земли эта задача является одной из основных (она называется задачей двух тел). В главе IV решалась аналогичная задача в предположении, что тело, обладающее большей массой, неподвижно (в теории щижения больших планет —это Солнце, в теории движения искусственных спутников — небесное тело, вокруг которого движется искусственный спутник). [c.176]
В динамике космического полета можно отчетливо проследить плодотворные взаимодействия техники и ряда фундаментальных и прикладных наук. Особенно следует подчеркнуть широкое использование методов и результатов небесной механики для решения задач динамики в гравитационных полях Солнца и планет солнечной системы. Так теория кеплеровых движений, теория возмущений орбит, исследование движений в оскулирующих элементах (метод Лагранжа) перешли из небесной механики в динамику космического полета с относительно небольшими изменениями и дополнениями. Но в ряде задач (например, теория движения искусственных спутников Земли) динамики космического полета пришлось создавать и разрабатывать совершенно новые методы исследования. Эти новшества вызываются дополнительными силами, которые в задачах небесной механики не играют существенной роли. Так, при движении спутников Земли на высотах до 500—700 км аэродинамические силы, обусловленные наличием атмосферы, оказывают влияние на законы движения и приводят к постепенному изменению (эволюции) орбит спутников. Изучение этих эволюций требует знания строения атмосферы на больших высотах и знания, законов аэродинамического сопротивления при полете с первой космической скоростью в весьма разреженной среде. Развитие космонавтики обусловило быстрый прогресс и аэродинамики и метеорологии. [c.19]
Движение точки в поле тяготения земного сфероида. Названная задача является основной в теории движения близкого искусственного спутника Земли. Следует, конечно, еще учитывать существенное влияние атмосферы Земли на движение спутника, и этому учету посвящен ряд работ. Не останавливаясь здесь на этом вопросе, рассмотрим движение спутника в поле тяготения Земли, пренебрегая всеми остальными факторами. Отличие поля тяготения Земли от поля тяготения ньютоновского центра вызывает возмущения в траектории спутника и отличие ее от кеплеровского эллипса. Существует хорошо разработанный в небесной механике аппарат теории возмущенийтак называемые уравнения в оскулирующих элементах. Использование этого аппарата позволяет весьма просто установить, что основными возмущениями в рассматриваемом случае будут поступательные движения узла орбиты и перигея орбиты. Однако эта задача оказалась занимательной и совсем с другой точки зрения. Обнаружилось, что эта задача в известном смысле эквивалентна старой классической задаче о движении точки в поле тяготения двух неподвижных притягивающих центров. Эта последняя задача, как известно, интегрируется в квадратурах она рассматривалась многими авторами, но не нашла конкретного применения в небесной механике. Появление искусственных спутников стимулировало бурный прогресс в исследованиях и привело, между прочим, и к открытию упомянутой эквивалентности. Таким образом, старая задача получила новое и очень важное конкретное приложение к теории движения искусственных спутников Земли. Первая публикация [1], устанавливающая эквивалентность двух задач, принадлежит молодым советским ученым Е. П. Аксенову, Е. А. Гребенникову, В. Г. Демину, (1961 г.). (В книге Брауэра и Клеменса [2], изданной в 1961 г., также содержится краткое упоминание о такой эквивалентности). Рассмотрим вопрос несколько подробней. [c.38]
Нужно отметить, что при изучении движений спутников больших планет, особенно спутников, близких к самой планете, приходится принимать во внимание не только взаимнйе возмущения спутников и возмущающее влияние Солнца, но также и возмущения, вызываемые-отличием формы планеты от сферической и неравномерностями ее внутреннего строения. Подобные возмущения ( возмущения формы ) в настоящее время играют, как известно, весьма значительную роль в астродинамике при расчетах движения искусственных спутников Земли и космических кораблей. [c.351]
Первоначально методы небесной механики были применены для изучения движений искусственных спутников Земли в поле притяжения самой планеты, с учетом сопротивления ее атмосферы и с учетом возмущений от Луны и Солнца. Работы по построению аналитических теорий движения велись в ИТА, в теоретической группе ГАИШ и в ряде других институтов и университетов. [c.359]
Изучение движения искусственных спутников Земли представляет интерес не только для специалистов по астродинамике, занимающихся прогнозированием движения ИСЗ и проектированием их орбит. Проблема эта ныне интересует широкий круг ученых, и прежде всего астрономов, геофизиков и геодезистов. Определение постоянных гравитационного поля Земли и параметров земной атмосферы, изучение лунно-солнечных приливов и движения полюса — вот неполный перечень задач, которые уже сейчас успешно решаются с помощью наблюдений ИСЗ. Можно думать, что в будущем появятся и другие не менее итересные и важные задачи, решение которых будет тесно связано с использованием наблюдений искусственных спутников. [c.7]
Определение времени существования искусственного спутника земли и исследование вековых возмущений его орбиты
- D. E. Okhotsimsky
- T. M. Eneiev
- G. P. Taratynova
аннотация
Одним из важных вопросов, связанных с проблемой создания искусственного спутника Земли, является достаточно надежное определение времени его существования на орбите. Вследствие сопротивления атмосферы будет происходить рассеяние энергии спутника и его постепенное снижение. При движении на больших высотах в разреженных слоях атмосферы сопротивление мало, и время движения спутника может оказаться весьма значительным. При движении на сравнительно небольших высотах (порядка 100–150 км) время существования спутника невелико, и при малых поперечных нагрузках спутник может не совершить даже одного полного оборота.
This is a preview of subscription content,
log into check access.
Preview
Unable to display preview. Download preview PDF.
Литература
1.
С. К. Митра, Верхняя атмосфера. Москва: ИЛ, 1955 г.
Google Scholar2.
Г. Н. Дубошин, Введение в небесную механику. Москва-Ленинград: ОНТИ, 1938 г.
Google Scholar3.
М.Ф.Субботин, Курс небесной механики. Москва-Ленинград: ОНТИ, 1937г.
Google Scholar4.
Н. И. Идельсон, Теория потенциала с приложениями к теории фигуры Земли и геофизике. Москва: ОНТИ, 1936 г.
Google Scholar5.
Г. П. Таратынова, Успехи физических наук. Гостехиздат 63, вып. 1 (1957 г).
Google Scholar
Copyright information
© Springer-Verlag Wien 1958
Authors and Affiliations
- D. E. Okhotsimsky
- T. M. Eneiev
- G. P. Taratynova
- 1.Академия наук СССРМоскваUSSR
Определение движения по Merriam-Webster
движение | \ ˈMüv-mənt \1а (1) : акт или процесс перемещения особенно : изменение места, положения или позы изучение движения планет
(2) : конкретный случай или способ передвижения был очарован ее грациозными движениями
б (1) : тактическое или стратегическое перемещение войсковой части : маневр(2) : наступление воинской части стабильное перемещение войск через границу
c : действие, активность — обычно употребляется во множественном числе, внимательно следил за движениями толпыб : серия организованных действий, направленных на достижение цели также : организованное усилие по продвижению или достижению цели движение за гражданские права движение за повышение минимальной заработной платы
3 : подвижные части механизма, передающие определенное движение.
б : ритмический характер или качество музыкальной композиции. танцевальное движение
c : отдельная структурная единица или подразделение, имеющая собственный тон, ритмическую структуру и темы и составляющая часть расширенной музыкальной композиции. Симфония состояла из трех частей.
d : особый ритмический поток языка : каденция стихотворение движение5а : качество (как в картине или скульптуре) представления или предложения движения.
б : яркое качество литературы, которое исходит из элементов, которые постоянно вызывают интерес читателя (например, быстро движущийся сюжет, наполненный действиями).
Just Move! Шесть преимуществ повседневного движения
Если вы чувствуете разочарование, когда слышите «делайте ежедневные упражнения», пора понять, что все дело в движении, и в этом очень мало того, что нужно делать!
Верно.Пора перестать думать о ежедневных упражнениях как об обязательстве с минимальными требованиями, такими как бег на пять миль или жим лежа. Спрос может быть гораздо менее обременительным и должен соответствовать вашему уровню физической подготовки.
От мозга до суставов — ежедневные движения могут улучшить каждую часть вашего тела. И дело не только в высокоэффективных упражнениях, вызывающих потоотделение. Это просто — независимо от того, хотите ли вы включить в свой распорядок небольшие движения или попробовать новое занятие, например, езду на велосипеде или йогу, увеличение ежедневной подвижности может помочь улучшить ваше общее состояние здоровья.
Начало с малогоКогда мы говорим «маленький», мы имеем в виду именно это. Попробуйте эти упражнения на растяжку всего тела в течение 10 минут, пройдитесь кругами по дому, когда вы разговариваете по телефону, прогуляйтесь по окрестностям или займитесь йогой в течение 15 минут. Все твои движения складываются!
Небольшие движения могут существенно повлиять на ваше физическое и психическое здоровье. И вы можете делать их все, не выходя из дома или на работе, не переодеваясь в спортивную одежду.
Шесть преимуществ движения
МЫШЦ : В вашем теле более 600 мышц, на которые приходится около 40% общей массы вашего тела.Двигаясь, вы укрепляете мышцы, что улучшает стабильность, равновесие и координацию. Не забывайте, что растяжка также помогает поддерживать здоровье ваших мышц.
КОСТИ : Движение помогает строить более прочные и плотные кости. Действия по наращиванию костей, такие как тренировки с отягощениями (веса), упражнения с весовой нагрузкой (бег трусцой, ходьба, походы) и тренировка равновесия (йога), могут способствовать повышению плотности костей.
СУСТАВЫ : Йога — это все о осознании тела, поэтому вы вынуждены обращать внимание на каждое движение.Осознавая, как вы двигаетесь, вы можете улучшить координацию и равновесие, внимательно следить за положением суставов и расслабиться. Кроме того, йога поощряет гибкость и диапазон движений, что повышает гибкость и функцию суставов.
МОЗГ : Ходьба 30-40 минут в день три раза в неделю может помочь «отрастить» структуры мозга, связанные со снижением когнитивных функций у пожилых людей. Если вы работаете из дома или чаще сидите, постарайтесь гулять.
СЕРДЦЕ : По данным British Heart Foundation, мы можем избежать около 10 000 смертельных случаев сердца каждый год, если будем поддерживать себя в форме, поэтому начните двигаться и попробуйте ездить на велосипеде, чтобы улучшить здоровье сердца. Регулярная езда на велосипеде снижает риск сердечных заболеваний на 50%.
ЛЕГКИЕ : Повышение частоты сердечных сокращений улучшает кардиореспираторную выносливость. Круговая тренировка с персональным тренером или групповой фитнес-класс — идеальное решение. Но опять же, вам не обязательно выполнять высокоинтенсивные движения.Вместо этого попробуйте BODYFLOW или Yoga Sculpt — он по-прежнему заставляет ваши легкие работать, но в более комфортном темпе.
Best AdviceПросто двигайтесь и избегайте бездействия! Найдите что-нибудь или несколько занятий, которыми вы любите заниматься, и ежедневно занимайтесь им.
Если вам нравится гулять, установите напоминание и сделайте это возможным. Если вы интересуетесь йогой, но еще не совершили прыжок, попробуйте групповые занятия. Если вы раньше бегали и хотите снова его поднять, вот несколько советов, как начать.
Нейробиолог Дэниел Вольперт однажды сказал: «У нас есть мозг по одной причине и только по одной причине — это производить адаптируемые и сложные движения. Движение — это единственный способ повлиять на окружающий нас мир… Я считаю, что понять движение — значит понять весь мозг. И поэтому важно помнить, что когда вы изучаете память, познание, сенсорную обработку, они существуют по какой-то причине, и эта причина — действие ».
Если вы хотите двигаться в помещении, попробуйте любую из наших домашних тренировок здесь!
Регистрация — Движение — BRAIN BODY COGNITION
Цены и регистрацияДобро пожаловать в Париж.Добро пожаловать в Сорбонну. Добро пожаловать на нашу 4-ю всемирную конференцию, которая состоится в одном из самых красивых городов западного мира, Париже, где мы соберемся во впечатляющих залах древнего института, который внес свой вклад в развитие науки, искусства и литературы и символизировал их. почти тысячу лет. Сорбонна.
Цена: Осознавая хаос и трудности, возникшие во всем мире в результате эпидемии Covid-19, мы решили продлить временное окно, отведенное для ранней регистрации, и дать возможность тем, кто регистрируется только сейчас, получить выгоду. от специальная скидка за раннюю регистрацию с уплатой сниженного взноса всего 750 евро.
Это специальная цена для ранней регистрации, и это предложение ограничено до 15 марта 2021 года. Вы можете разделить свои платежи (см. Ниже), но если вы хотите принять участие — не упустите возможность зарегистрироваться сейчас в этой скидке.
Платеж: Чтобы упростить регистрацию, вы можете зарегистрировать и разделить платеж на две части. Просто отметьте это в регистрационной форме. Оплата может производиться кредитной картой или банковским переводом.
Студенты: Студенты из признанных академических институтов имеют право на сниженный регистрационный сбор в размере 680 евро. Если вы студент и запрашиваете эту скидку, укажите это в своей регистрационной форме и отправьте нам официальное подтверждение вашего статуса студента от вашего университета.
Отмена: Плата за отмену не взимается до 30 дней до открытия конференции. Таким образом, вы можете зарегистрироваться сейчас и обеспечить свое участие, а если что-то случится позже и вы захотите отменить — вы можете сделать это легко, и все ваши взносы будут возмещены.Только в случае отмены менее чем за 30 дней до открытия конференции взимается символическая плата за отмену в размере 100 евро. (Отмена за последние три дня до открытия конференции приведет к штрафу за отмену в размере 250 евро. В случае неявки или уведомления об отмене в последний момент возврат не производится).
Отели / размещение: Вы можете воспользоваться услугами нашего офиса или самостоятельно забронировать номер в отеле или апартаменты в Париже. Чтобы быть в безопасности и помочь вам, мы зарезервировали для наших участников номера по сниженным ценам в некоторых местных отелях.Вы можете попросить наш офис прислать вам предложения по размещению (отметьте это в вашей регистрационной форме) или вы можете сделать это самостоятельно. Выбирая отель, убедитесь, что он имеет удобный доступ к общественному транспорту (метро или автобусу) от отеля до Университета Сорбонны в Латинском квартале. Вы всегда можете проконсультироваться с нашим регистрационным офисом (попросите совета относительно регистрационной формы или отправьте запрос по электронной почте на [адрес электронной почты])
Как зарегистрироваться: Внизу этой страницы находится ссылка на онлайн-регистрационную форму .Нажмите на ссылку и заполните необходимую информацию в форме. Затем отправьте его онлайн (форма защищена). В течение трех рабочих дней вы получите подтверждение из нашего офиса (если вы не получите от нас ответа в течение трех дней — отправьте нам электронное письмо)
Вопросы : не стесняйтесь спрашивать нас. Отправьте электронное письмо в наш секретариат по электронной почте: [адрес электронной почты защищен]
Регистрационный офис: Процедуры регистрации на эту конференцию обрабатываются нашим регистрационным офисом « Regina Tours — Israel ».В случае возникновения каких-либо вопросов или необходимости помощи в процессе регистрации, оплаты или размещения, пожалуйста, свяжитесь с г-жой Дорис Шефер. Электронная почта: [электронная почта защищена] — Телефон: + 972-2-5944776
Нажмите здесь, чтобы получить:Приглашение — Движение — BRAIN BODY COGNITION
Уважаемые коллеги,
Мы с большим удовольствием приглашаем вас принять участие в Международной конференции по движению: мозг, тело и познание, которая состоится в Парижском университете / Сорбонне в сентябре 2021 года.Это четвертая итерация конференций по этой теме, которые ранее проводились в Оксфордском университете, Гарвардской медицинской школе и Тель-Авивском университете.
Целью конференции является обмен знаниями о связи человеческого движения с когнитивными функциями и установление диалога между профессионалами из разных дисциплин. В этом году в центре внимания, помимо прочего, будут находиться связь и движение мозга и кишечника, развитие и старение, нейропсихология когнитивно-моторного взаимодействия (оценка и лечение), физическое воспитание как инструмент для улучшения когнитивных функций, гендерные проблемы в движении. познание и другие области.Как обычно, тематические области генеральной конференции будут также включать в себя применение к реабилитации и терапии, спорту, моторному обучению, взаимоотношениям между мозгом и поведением, черепно-мозговой травме, походке и познанию, а также танцам.
Мы приветствуем ваше участие в этой конференции. Если вы, кроме того, желаете представить свое исследование, специальную технику или клинический опыт, пожалуйста, отправьте свое резюме вниманию научного комитета по адресу: [электронная почта защищена], после чего он будет рассмотрен для включения в программу.Принятые тезисы будут опубликованы в материалах конференции, а отдельные статьи — в журнале Brain, Body Cognition .
Формат для тезисов доступен на веб-сайте конференции и будет включать устные и стендовые презентации, а также симпозиумы, панельные дискуссии и семинары. Крайний срок подачи тезисов — 28 февраля 2021 г., не дожидайтесь последней минуты.
Поскольку количество участников, которых мы можем принять на этой конференции, ограничено из-за ограничений по вместимости залов Сорбонны, пожалуйста, не забудьте зарегистрироваться сразу же после получения этого приглашения или как можно раньше.Вы всегда можете отменить регистрацию, но вы можете оказаться без возможности зарегистрироваться и присоединиться к нам, если будете ждать слишком долго.
Если у вас возникнут вопросы, свяжитесь с нашим конференц-офисом [адрес электронной почты защищен]
Академические и клинические учреждения, связанные с конференцией, отражены в составе научного комитета.
Надеемся на встречу с вами в сентябре 2021 года в Париже, Франция.
Желаю наилучших пожеланий,
Джерри Лейсман Фредерик Марин
Председатель Научного комитета Сопредседатель Научного комитета
ДВИЖЕНИЕ — 2021 ДВИЖЕНИЕ — 2021
Профессор, профессор нейро- и реабилитационных наук, профессор Университета
Профессор кафедры неврологии Университета Сорбонны,
Хайфский университет Факультет социального обеспечения Université de Technologie de Compiègne
и науки о здоровье.Директор, Biomécanique et Bioingénierie
Центр инноваций профессора Neurológica Restaurativa
Universidad de Ciencias Medicas Plateforme Technologie Sport Santé
de la Habana, Куба [защищенный адрес электронной почты]
[адрес электронной почты защищен]
Комитет— Движение — ПОЗНАНИЕ ТЕЛА МОЗГА
Председатели научного комитета :
Джерри Лейсман , председатель Научного комитета
Хайфский университет, Хайфа, Израиль, и Universidas de la Ciensidad de Ciens , Институт неврологии и нейрохирургии, Гавана, Куба
Фредерик Марин Сопредседатель научного комитета, профессор университетов Сорбонны, Технологический университет Compiègne, Biomécanique et Bioingénierie члены:
Амит Абрахам , Университет Эмори, Атланта, Джорджия, США
Веред Авив, Иерусалимская академия музыки и танца, Иерусалим, Израиль.
Амедео Д’Анджиулли , Департамент нейробиологии и Институт междисциплинарных исследований (детские исследования), Карлтонский университет, Оттава, Канада
Джерарда Сильвена Мейера, Университет Карнеги-Меллона и лаборатория Mindful Choice, штат Пенсильвания, США
Тал Дотан Бен-Сусан , Научно-исследовательский институт неврологии, образования и дидактики, Фонд Патрицио Паолетти, Ассизи, Италия.
Элиэзер Кармели, Кафедра физиотерапии — Хайфский университет, Хайфа, Израиль.
Станислав Чиз , Университетская школа физического воспитания, Вроцлав, Польша
Эммануэль Дончин , Университет Южной Флориды, Тампа, Флорида, Соединенные Штаты Америки.
Марио Эстевес-Баес , Институт неврологии и нейрохирургии, Гавана, Куба.
Таня Гуревич, Отделение неврологии, Медицинская школа Саклера, Тель-Авивский университет, Тель-Авив, Израиль.
Джеффри Хаусдорф, Лаборатория походки и нейродинамики, отделение неврологии, Тель-Авивский медицинский центр Сураски.
Ньютон Ховард, Лаборатория вычислительной нейронауки, Департамент хирургических наук Наффилда, Оксфордский университет, Оксфорд, Великобритания, и Лаборатория синтетического интеллекта, Массачусетский технологический институт, Кембридж, Массачусетс, Соединенные Штаты Америки.
Эйтан Керем, Отделение педиатрии, Медицинский центр Еврейского университета Хадасса, Иерусалим, Израиль.
Хосе Леон-Каррион , кафедра экспериментальной психологии, Севильский университет, Севилья, Испания.
Яир Рэй Лифшиц , президент ErgoMed, Хайфа, Израиль
Каликсто Мачадо , Институт неврологии и нейрохирургии, Гавана, Куба.
Одед Мейрон , Центр клинических исследований мозговых наук, Медицинский центр Герцога, Иерусалим
Роберт Мелилло , Хайфский университет, Хайфа Израиль, Национальный институт наук о мозге и реабилитации, Назарет, Израиль и Гилберт, Аризона.
Хоав Меррик , Национальный институт детского здоровья и человеческого развития в Израиле, отделение педиатрии, Медицинский центр Еврейского университета Хадасса, Кампус горы Скопус, Иерусалим, Израиль.
Леон Моралес-Кесада, Реабилитационная больница Сполдинг, Гарвардская медицинская школа, Бостон, Массачусетс, США.
Ахмед Мустафа , Институт мозга и поведения Маркса, Школа социальных наук и психологии, Университет Западного Сиднея, Сидней, Австралия.
Рафаэль Родригес-Рохас, Centro Integral de Neurociencias AC, HM Hospitales- Puerta del Sur, Университет Сан-Пабло, Мадрид, Испания.
Thomas Schack , Neurocognition and Action Group, Университет Билефельда, Билефельд, Германия.
Лесли Вайзер , Отделение психиатрии, Больница Маклин и Медицинская школа Гарвардского университета, Бостон, Массачусетс, США.
Темы — Движение — ПОЗНАНИЕ МОЗГА
Моторно-когнитивные взаимодействияНа конференции этого года, помимо наших основных тем (перечисленных ниже), мы уделим особое внимание следующим темам:
* Связь и движение мозга и кишечника.
* Гендерные проблемы в движении и познании.
* Нейропсихология когнитивно-моторного взаимодействия (оценка и лечение).
* Физическое воспитание как инструмент когнитивного улучшения.
* Развитие и старение.
Новые направления реабилитационной науки
Реинтеграция движения и познания после травм, функциональной нейрохирургии, DBS, поражений, двигательных расстройств и когнитивных нарушений; Методы и результаты реабилитации; Движение и нейропластичность, функциональные связи и разъединения, применение при двигательных расстройствах.BDNF и обучение.
Приборы, технологии и измеренияПластичность сенсомоторных систем . нейромодуляция для облегчения моторного обучения . Передача навыков от роботизированной терапии до функционального восстановления . Передача обучения. Применение низкоэнергетических лазеров, нейробиоуправление, прямая стимуляция блуждающего нерва, DBS, EEG, qEEG, кинезиологическое измерение, измерение моторного обучения и реорганизации областей мозга, TMS, fMRI, DTI для изучения сенсомоторных моторно-когнитивных сетей.Вычислительные модели выбора действий и моторного обучения. Эргономика и психология человеческого фактора.
Эволюция движения как основа ПознаниеМоторные истоки языка и памяти. Роль двуногости в человеческом познании. От сенсомоторной интеграции к когнитивному развитию. Время, критический компонент моторного связывания и, в конечном счете, когнитивного связывания, примитивных рефлексов, постуральных рефлексов, социализации и познания.Примитивные рефлексы являются остатками филогенетических моделей движения и имеют решающее значение для когнитивного развития. Синхронизация, координация и интеграция сетей напрямую связаны с двигательным развитием и синхронизированным движением, функциональной и анатомической архитектурой двигательного действия.
Человеческое развитиеДвижение плода и обучение и имитация, поддержание примитивных рефлексов и когнитивных функций, развитие синергии движений и когнитивного взаимодействия, обучение и движение, Развитие движений, Нейрообразование в школах,
Женщины двигаются иначе, чем мужчины?Конференция уделит особое внимание докладчикам, которые хотят затронуть проблему различных движений и / или различных моделей мышления мужчин и женщин.
Спорт: расширение познавательных возможностейРобототехническое моделирование двигательных действий. Коучинг двигательных задач в дополненной (виртуальной) реальности. Архитектура двигательного действия. Моторный опыт и оптимизация спортсмена высокого уровня. Улучшение спортивного движения и обучения.
Генетика / омикс (геномика и т. Д.)Генетика и эпигенетика СДВ / СДВГ и аутизма в двигательных и когнитивных приложениях, нарушение координации развития.
Влияние окружающей средыФункциональная неврология, функциональная иммунология, функциональное питание, внешние воздействия на двигательные и когнитивные функции, токсины окружающей среды.
Социальная активностьОт времени до синхронизации и социализации; Движение и общение; Жест; Язык знаков; Групповая динамика; Невысказанный диалог; Воплощение и сопереживание; наука о танце и ее значение для обучения, реабилитации, социальной активности, теории увлечения, танцев, музыки и арт-терапии как механизмов содействия сети мозга.
СДВГ и расстройства аутистического спектраТренировка, специфичная для полушария, СДВГ и сокращение примитивных рефлексов, Влияние BDNF на когнитивно-моторное взаимодействие при СДВГ, виртуальные игры при СДВГ, вестибулярно-моторно-когнитивные взаимодействия при СДВГ , Влияние питания на когнитивно-моторную деятельность при СДВГ .
Искусственный интеллект в моделировании движения человека
Приложения в робототехнике и интерфейс мозг-компьютер (BCI), виртуальные системы, реабилитация, анализ движений и особенности походки, вычислительные методы, объединяющие движение, анализ и персональную навигацию, предотвращение падений, Паттерны походки с использованием векторных машин, Эволюционные методы, Вычислительное моделирование
Взаимодействие эмоций и движений
Движение к эмоциям
Движение и удовольствие
Эмоции на языке жестов
Чтение эмоций в движении
Энкефалины и движение
Время для движенияДвижение во времени и циркадные часы
Танец
Дополнительные потенциальные темы:
Терапевтические упражнения * Эргономика * Кинезиология * Двигательное обучение и поведение * Спорт и физическая психология и физиология * Биомеханика движения * Технологии и инструменты для науки о движении * Аспекты развития когнитивно-двигательного взаимодействия * Двигательные расстройства * Двигательные расстройства Контроль * Координация и вестибулярная функция * Нейромодуляция * Походка * Реабилитация двигательной дисфункции * Неврология танца * Оптимизация двигательной активности человека * Когнитивное двигательное взаимодействие * Старение и когнитивно-двигательное взаимодействие.
Области применения мастерской :Физиотерапия * По следам Фельденкрайза * Восстановительная и функциональная * Неврология * Кинезиология и физическое воспитание * Танцевальная терапия * Мастерская танцоров * Технологические семинары для реабилитологов * Когнитивные занятия.
Важность движения — Mayo Clinic Health System
Избранная тема
Механизм.Кажется, это самая простая вещь в мире. Наши тела созданы, чтобы бегать, прыгать и манипулировать объектами, помимо прочих чудес передвижения. Но как часто мы используем свое тело в полную силу?
Сидеть. Остаться. Повторить.
Мы превратили сидение в искусство. Однако чрезмерное сидение сейчас связано со многими заболеваниями и состояниями, включая ожирение, гипертонию, боли в спине, рак, сердечно-сосудистые заболевания и депрессию.
Чрезмерное сидение — довольно новая проблема в истории человечества.Двести лет назад 90% мира жили в сельскохозяйственных общинах. Люди сидели от трех до пяти часов в день, но только для того, чтобы сделать перерывы в работе. Современные американцы сидят от 13 до 15 часов в день.
Были ли наши предки полевиками, лидерами общественных танцев или парикмахерами, они все равно проходили несколько миль в день и сидели недолго. Сравните это с сегодняшним среднестатистическим офисным работником, который делает несколько шагов к машине и едет на работу, чтобы просидеть в море кабинок большую часть дня.Неудивительно, что сидение целый день влечет за собой последствия. Мы не созданы для этого.
Движение вперед
Победить сидячий образ жизни не так просто, как несколько советов и уловок, но есть несколько вещей, которые каждый может сделать, чтобы двигаться в правильном направлении.
Вот несколько способов включить движение в свой день:
- По возможности используйте стоячий стол.
- Установите напоминание о необходимости вставать и двигаться не реже одного раза в час.
